Semestr ve znamení robotiky a zkoušek

03. 07. 2017
6 minut čtení
Line Launcher
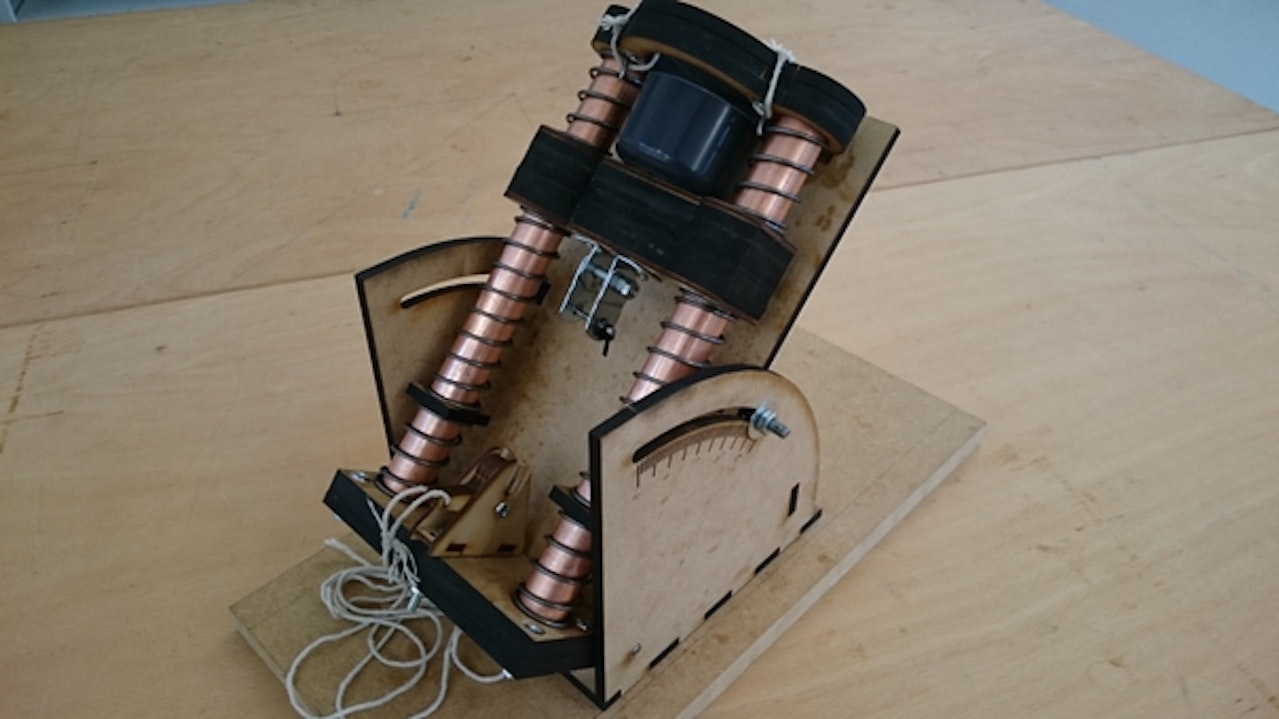
Mezi posledními dvěma zkouškami z prvního semestru nám začal první „pořádný“ univerzitní projekt. V naší skupině jsme byli jen dva studenti a dostali jsme za úkol postavit tzv. line launcher, zařízení, které se používá například při natažení lana mezi dvěma loděmi, a to tak, že se z line launcheru vystřelí lano na další vzdálenou loď. To pak může sloužit například k natažení rybářské sítě. Náš úkol byl během deseti dnů navrhnout a postavit podobné zařízení s rozpočtem dvaceti liber, které by střílelo squashový míček přivázaný k vlasci na vertikální terč vzdálený až šest metrů. Další částí zadání bylo vytvořit počítačovou simulaci line launcheru, která nám měla po zadání požadované vzdálenosti terče prozradit ideální nastavení zařízení pro výstřel.
Během designování jsme podcenili tření dřevěného jezdce na měděných trubkách a ani po improvizaci a výrobě vlastních ložisek z hlaviček šroubů se nám nepodařilo vystřelit na požadovanou vzdálenost. Nicméně náš line launcher vynikal přesností a naše skupina obdržela plný počet bodů za prezentaci a design. Organizátoři také projevili zájem vystavit line launcher na Design Show, která je každoročně pořádaná naší fakultou.
Eurobot 2017
Dalším projektem, na kterém jsme intenzivně pracovali v rámci robotického spolku RoboSoc, byl Eurobot. Jedná se o mezinárodní robotickou soutěž, kde proti sobě najednou soutěží dva týmy, každý s dvěma roboty, na stejném hřišti, kde plní různé úkoly.
Letošní téma bylo Měsíční vesnice. Dva hlavní úkoly představovaly vyložit vertikálně uložené válce ze slotů ve tvaru raket (představující zásilku ze Země) a přemístit je do horizontálních slotů. Některé z nich byly vícebarevné a musely být natočeny týmovou barvou nahoru. Další hlavní úkol byl sesbírat míčky představující materiál na stavbu budov, roztřídit je a přemístit do slotu umístěného nad zemí.
Eurobot pro nás představoval několik velkých výzev: vymyslet veškeré mechanismy a jak je vtěsnat do pravidly limitovaných rozměrů, poté vše nadesignovat, postavit a nakonec roboty naprogramovat. Přes první dvě fáze se nám podařilo celkem úspěšně projít. U programování jsme si ale ukousli moc velké sousto. Zatímco ostatní týmy psaly jednodušší a přímočarý kód, my jsme intenzivně pracovali na pokročilých programech. Jeden z nich byl pro rozpoznávání objektů na hřišti pomocí kamery a určení jejich přibližné vzdálenosti, další na určení polohy robota a algoritmu, který si sám najde optimální cestu k určenému cíli pomocí v něm uložené mapy a reálných dat z jeho sensorů překážek (např. ostatních robotů a hracích elementů). Podcenili jsme čas potřebný pro testování a optimalizaci tzv. low level kódu – ten ovládá funkci jednotlivých servomotorů, motorů a sensorů. Neočekávané technické problémy několik dní před soutěží nám z tak limitovaného času ještě ubraly. Ani nepřetržité pracovní vypětí čtyřicet osm hodin před soutěží bez spánku nám stejně nestačilo na to, abychom vše na soutěž zprovoznili.
Nicméně Eurobot byl pro mě obrovskou zkušeností, kde jsem mohl nejen uplatnit znalosti z univerzitní výuky, ale také jsem si poprvé pořádně vyzkoušel, jaké to je pracovat na projektu, do kterého se začlenilo 8 lidí, a trval téměř celý rok. I přes to, že se nám nepodařilo kvalifikovat, jsem se naučil mnohé o designu, programování a také o důležitosti určitých aspektů při skupinových projektech, jako je umět reálně plánovat, dělat věci od základu k pokročilejším, a také očekávat problémy.
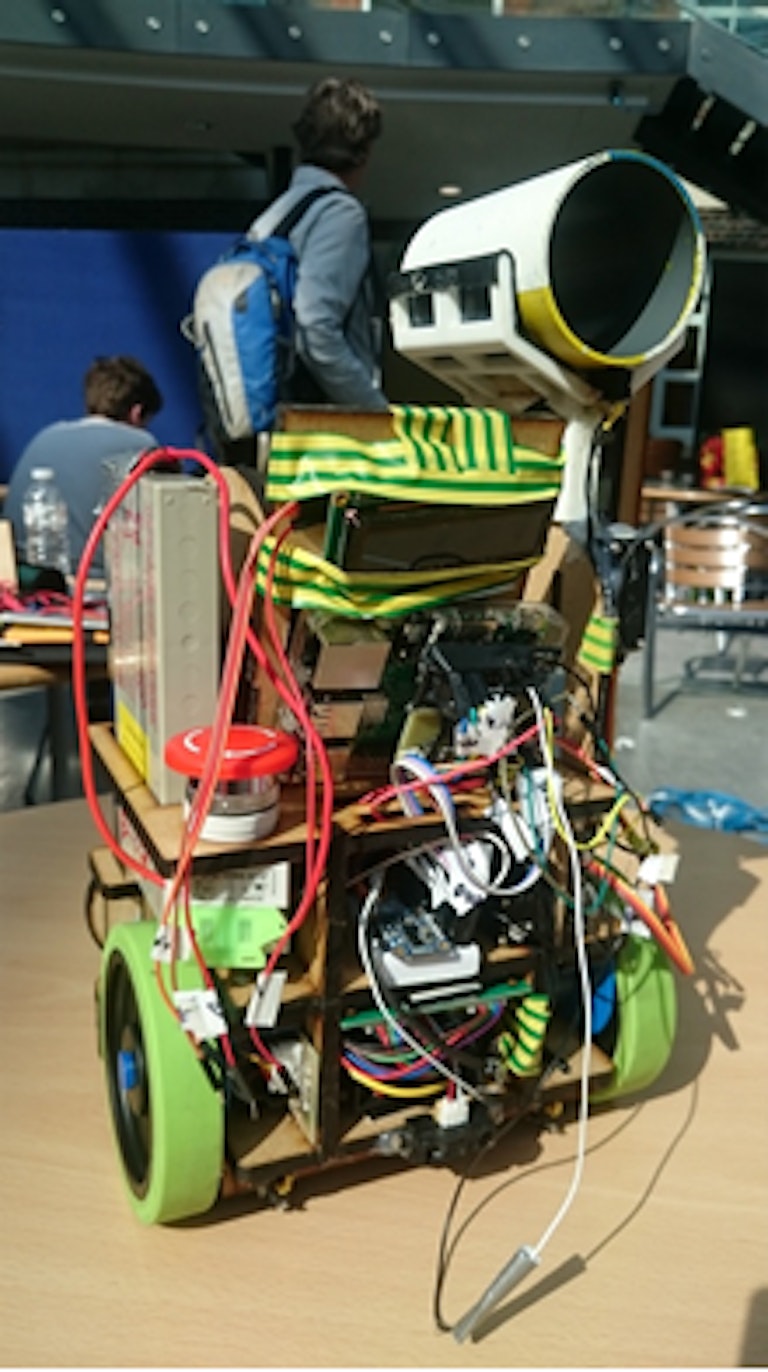
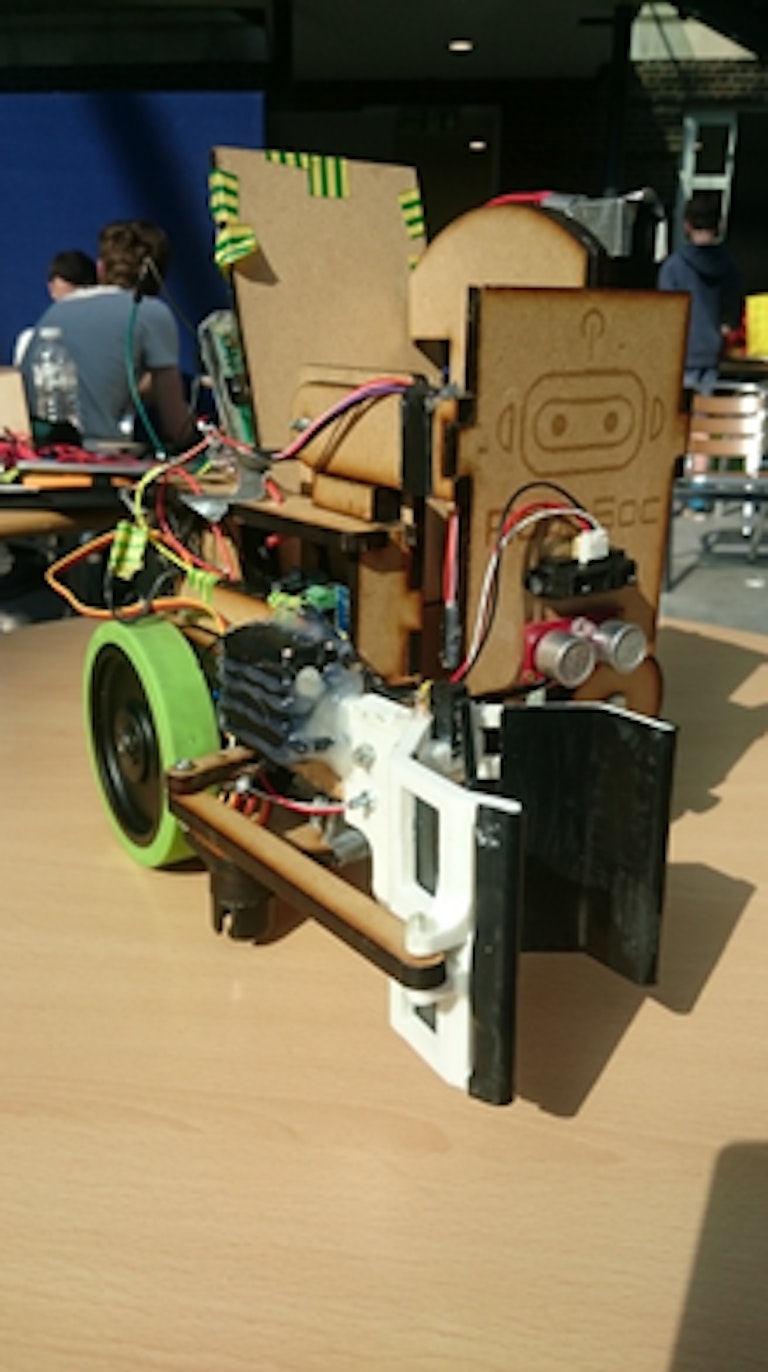
Takto vypadal jeden z našich dvou soutěžních robotů. Jeho úkol byl vyložit raketu s válci, naložit čtyři z nich najednou, transportovat je k vertikálním slotům a tam válce otočit naší týmovou barvou nahoru a položit je.
Zkoušky
O zkouškách se zmíním jen krátce, jelikož je zde již několik článků, kde autoři píší o systému zkoušek ve VB.
Rozdíl oproti většině veřejným univerzit v ČR je, že v našem oboru ve VB nemáme zápočty. Práce během školního roku se hodnotí určitým procentem z celkové známky. Tím pádem na zkoušku z předmětu poté většinou připadá něco kolem sedmdesáti procent. To je někdy ještě rozděleno na několik zkoušek na konci roku. Z některých předmětů jsou zkoušky i v pololetí, to ale není tak obvyklé.
Veškeré zkoušky, které jsme měli, byly písemné. Nebyla žádná možnost volby termínu. Ten byl stanovený univerzitou. Měli jsme všech šest finálních zkoušek během devíti dnů. Všichni jsme je psali najednou ve velké sportovní hale, kam byly umístěny lavice. Během zkoušek platí přísné podmínky jako zákaz mluvení ihned po vstupu do místnosti, telefon musí být vypnutý a umístěný na lavici v přiděleném sáčku displejem dolu, doprovod při potřebě na toaletu apod.
Z mého pohledu byl ve zkouškách obrovský obsah učiva (z celého univerzitního roku), ale na druhou stranu jsme na některé zkoušky dostali papír se vzorečky a na zkoušku z materiálů jsme si dokonce mohli přinést jednu A4 s poznámkami. Zkoušky tedy na mě působily tak, že po nás požadovali, abychom rozuměli velkému množství konceptů a principů, na druhou stranu po nás nechtěli, abychom se učili nazpaměť některé věci, které se snadno a rychle najdou na internetu.
Robotický Den 2017, Praha
Během zkouškového jsme v rámci RoboSoc v týmu čtyř studentů začali pracovat na dvou robotech na soutěž v Praze s názvem Robotický Den 2017, který ve skutečnosti trval dva dny.
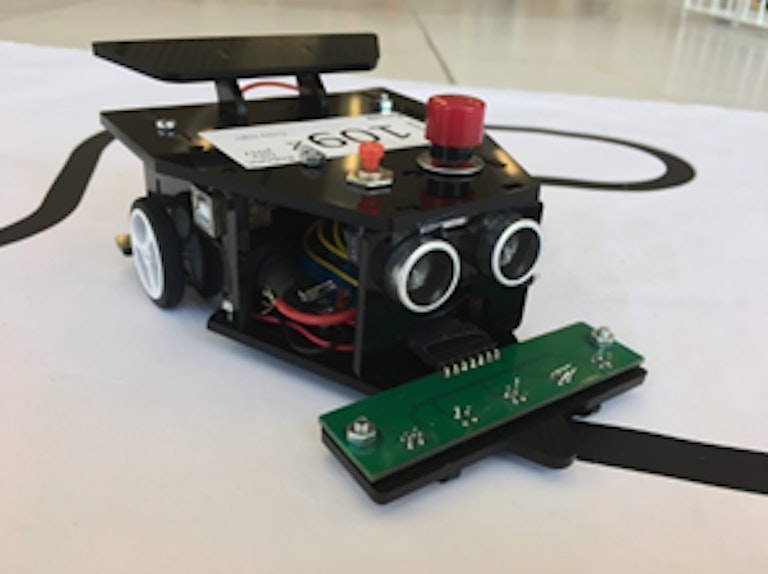
Na vymyšlení, design, postavení a programování robotů jsme měli přibližně jen deset dní, takže jsme se k tomu snažili vše přizpůsobit. Jeden robot připomínající formuli byl určený k závodům na čáře, kdy se měří robotovi čas, než objede okruh vyznačený černou čárou na bílém podkladu. Závod je o to komplikovanější, protože čára může být přerušená, rozdvojená a na čáře mohou být položeny překážky. Robot musí být autonomní, tedy bez jakéhokoliv zásahu soutěžících během závodu.
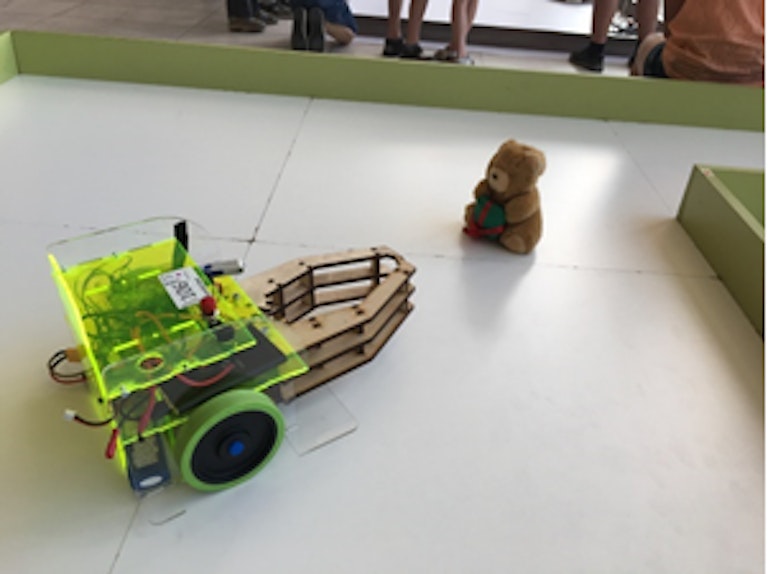
Druhý robot byl učený k soutěži s názvem Bear Rescue. Měl za úkol projet kratší trasu s několika zatáčkami a pak na hracím poli najít plyšového medvídka a dovést jej zpět. My jsme soutěžili v dálkově ovládané verzi, nicméně náš robot byl připravený na implementaci hloubkové kamery a dalších senzorů, aby mohl soutěžit také v autonomní kategorii. Velmi omezený čas nám v této kategorii soutěžit nedovolil.
S robotem pro Bear Rescue jsme úspěšně prošli kvalifikací. Při boji o třetí místo nám ale shořelo servo, skončili jsme tedy čtvrtí. U formule se nám asi hodinu před soutěží rozbila klíčová část (deska s procesorem, která řídí celého robota), a i když se nám podařilo desku vyměnit, nestihli jsme do ní připojit vše v čas, takže jsme s tímto robotem soutěžit nemohli.
Druhý semestr jsem si hlavně díky projektům velice užil. Poskytli mi také nedocenitelné zkušenosti pro příští rok, kdy budeme dělat podobný skupinový robotický projekt v rámci oboru. Teď mě ještě čeká letní stáž, kde budu programovat software pro testovací zařízení a už teď se těším na příští univerzitní rok.











Komu pomáháme
The Kellner Family Foundation
Kontaktujte nás
2026 © THE KELLNER FAMILY FOUNDATION