Semester full of robotics and exams

03. 07. 2017
7 minut čtení
Line Launcher
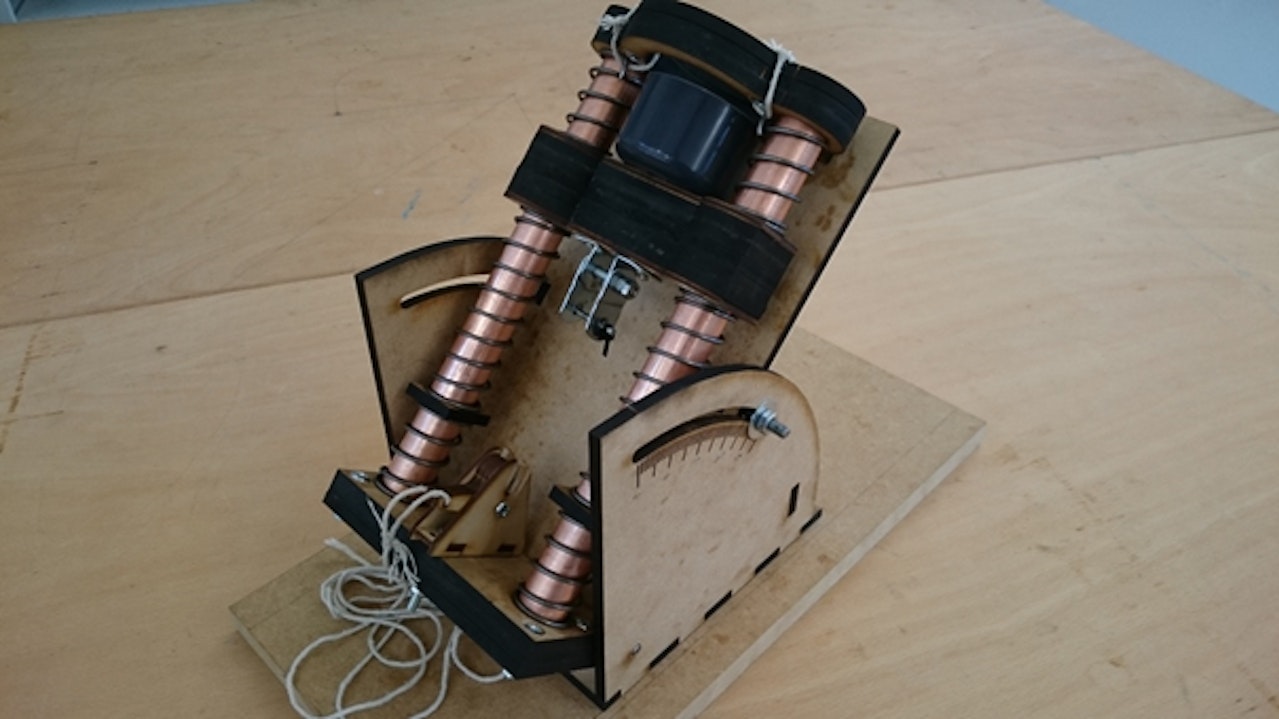
Our first ‘proper’ university project started just between our last two exams of the first semester. We were only two students in our group and the task was to build so called line launcher, a device used e.g. for laying a rope between two boats. A rope is shot from a line launcher placed on one boat to another. Its purpose may be for spreading a fishing net for example. Our task was to design and build similar device within ten days with a budget of twenty pounds. It was supposed to shoot a squash ball with a fishing line to the vertical target placed up to six metres far. Supplementary task was to make a computer simulation of the line launcher, which would provide us with the setting parameters so that it hits the target.
Unfortunately, we underestimated the friction of the wooden slider on the copper tubes. Although we tried to improvise and manufactured a new slider with bearings created from bolt heads, the friction was still too high, so we could not hit the required distance. However, our line launcher stood out in terms of accuracy and our group obtained a full score for presentation. For this reason, organisers showed interest that they would like to exhibit it at the Design Show which is an exhibition annually held by our faculty.
Eurobot 2017
Another project we intensively worked on within the robotic society RoboSoc was Eurobot. It is an international robotic competition. In each round, there are two teams competing against each other at the same playground. Each team can have two robots which accomplish various tasks.
This year’s theme was Moon Village. Two main tasks were to empty vertically placed cylinders (representing cargo from the Earth) and place them to horizontal slots. Some of them with several colours had to be turned with a team colour on the top. Another main task was to collect balls representing material for building construction, sort them and place them to slots which were positioned above the ground.
Eurobot presented several great challenges to us: invent all the mechanisms for accomplishing the tasks and think up how to fit them into limited dimensions, then designing and building and finally coding the robots. We managed to get through the first two stages quite bravely, however, we got stuck at the programming as we tried to do too advanced things for us. Meanwhile other teams were writing a simple and straightforward code, we were intensively working on fairly advanced algorithms. To mention a few of them: game elements identification using camera vision and determining their approximate distance; robot location determination and algorithm which uses a map in its memory and real-time data from sensors of obstacles (game elements and other robots) to find an optimal path to its destination. We underestimated the time required for testing and optimisation of low-level code which governs function of individual servo motors, motors and sensors. Unexpected technical issues a few days before the competition shortened our already very limited time. Even though we constantly worked without a break for sleep for forty-eight hours until the competition, we did not manage to make the whole thing work.
However, Eurobot was a huge experience for me because I not only used knowledge from the university course, but I could also try out for the first time what it is like to work on a project which incorporated eight people and went on for almost the whole academic year. Even though we did not manage to qualify, I learnt a lot about design, programming and about importance of certain aspects in making group projects, such as being able to plan realistically, making things from basis to advanced and also expecting problems.
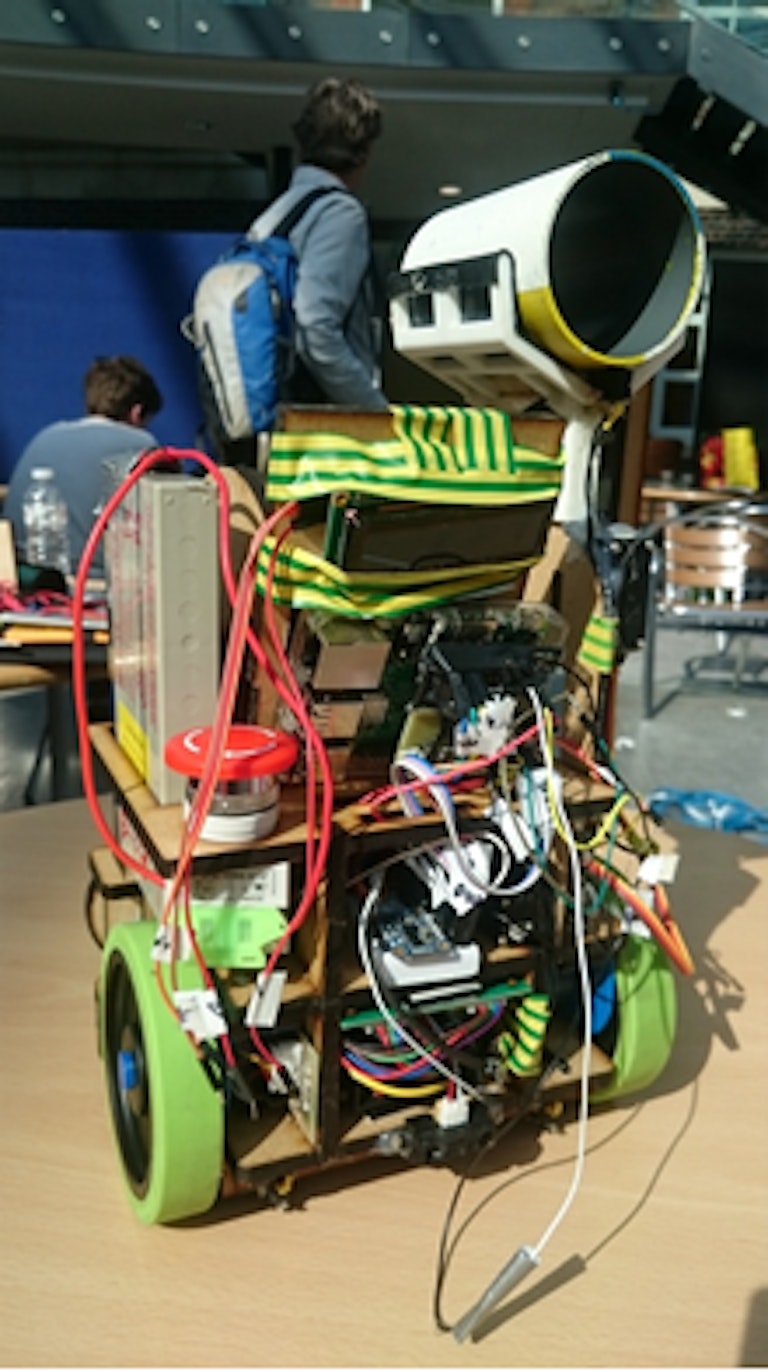
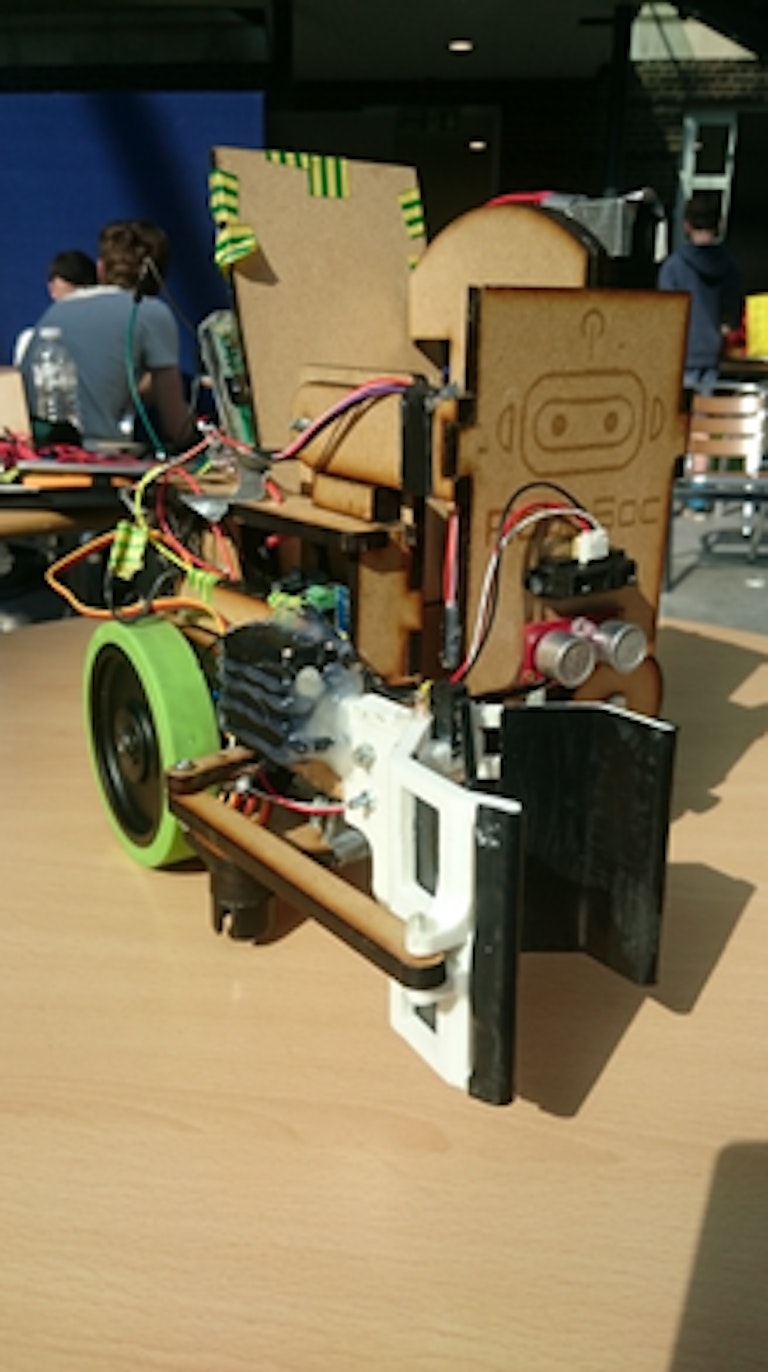
This is one of our two robots for the competition. It is able to unload the rocket with cylinders, load four of them each time, transport them, turn the cylinders with our team colour on the top and lay them to the slots.
Exams
I am going to write about exams only briefly as there are several articles where authors mention about the system of exams in the UK.
A difference compared to public Czech universities is that we do not have to write any continuous tests in order to progress to the final exams. In contrast, our work during the year is often assessed by certain percentage of overall mark. Hence the final exam is usually around seventy percent. This is sometimes divided into more exams at the end of the year, sometimes there is an exam from some modules after the first semester, it is not that usual though.
All the exams we had were written. There was no choice of date. It was determined by the university. We had all the six final exams during nine days. All of us wrote them at the same time in a big sports hall where there were placed desks. There are very strict conditions during exams such as a ban of speaking immediately after entrance of the room, mobile phone has to be switched off and placed in a plastic bag with display pointing down, using bathroom only with accompaniment etc.
From my point of view, the topics in exams were very wide (from the whole university year), on the other hand we got a formula sheet at some exams and we were even allowed to bring A4 sheet with notes to the Materials exams. Exams gave me an impression that examiners want us to be able to understand to wide range of concepts and principles, on the other hand, sometimes they do not require us to memorise things, which are not of a great importance or are easily searchable online.
Robotic Day 2017, Prague
During exam period, we started to work in a team of four students on two robots for a competition in Prague called Robotic Day 2017, which actually lasted for two days.
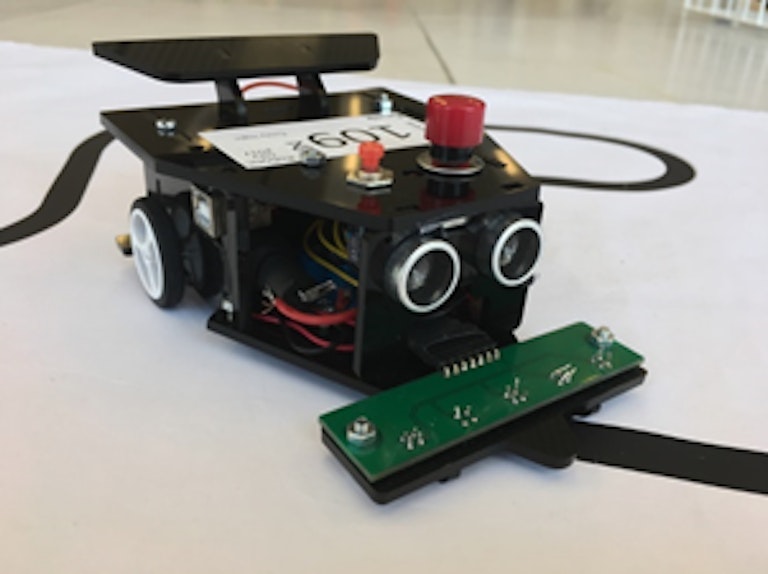
We had only ten days for thinking up, designing, building and programming the robots, so we adjusted their complexity to this fact. One of the robots looking like a formula was built for line following races. The time is measured until robot completes a round marked by a black line on a white background. The line can be interrupted and divided, and there can be obstacles laid on the track as well, which makes the race more complicated. Robot has to be autonomous.
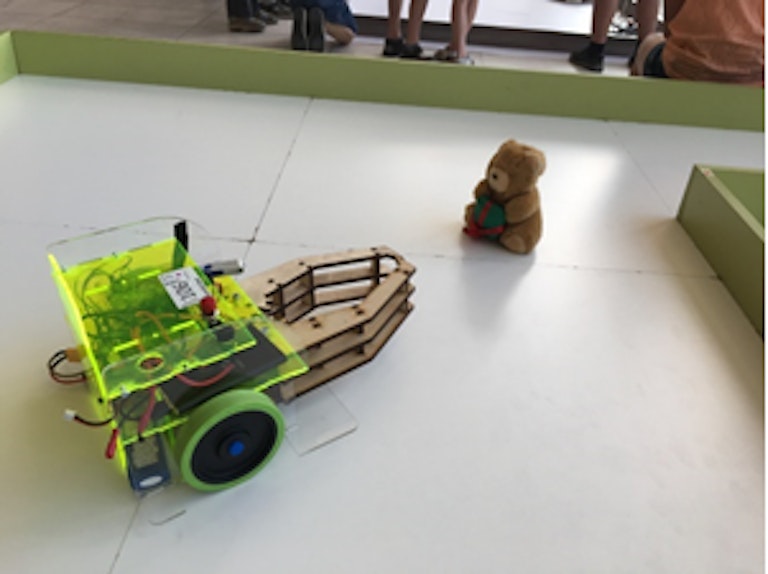
Another robot was built for a competition called Bear Rescue. Its task was to go through a short track with several turns and then find a teddy bear and bring it back. We competed in a remote-control category, however, our robot was ready for implementation of a depth camera and other sensors which would enable it to compete in an autonomous category too. Our limited time was not sufficient to allow us to compete in this category.
We managed to pass the qualification in the Bear Rescue competition. However, when we were competing for the third place, a servo on the robot burnt down, so we placed fourth. On the formula, one of the key parts broke just an hour before the competition (board with a microprocessor which governs the whole robot). Although we managed to change the board, we did not have enough time to redo all the wiring, which did not let us compete.
I really enjoyed the second semester, mainly because of the projects. They have also provided me with an unappreciable experience for the following year when we are going to do similar robotic project within our university course. I am just about to commit my summer internship now where I am going to write a software for a test rig. I already look forward to the next academic year.








Who do we help
The Kellner Family Foundation
2026 © THE KELLNER FAMILY FOUNDATION